Robô inspirado em caracóis pretende combater a poluição por microplásticos na água
Para responder à crescente preocupação ligada aos microplásticos, os cientistas criaram um protótipo de robô inspirado em um caracol, concebido para eliminar os mesmos dos oceanos, mares e lagos.

A poluição oceânica por plásticos representa uma ameaça grave, com milhões de toneladas a serem depositados anualmente nos mares, desde detritos de grandes dimensões a microplásticos microscópicos. O perigo vai para além do emaranhamento da vida marinha em plásticos maiores e da ingestão de microplásticos, causando danos às espécies e afetando toda a cadeia alimentar marinha.
Embora os esforços atuais se concentrem na remoção de resíduos plásticos visíveis através de iniciativas como os projetos de limpeza dos oceanos, estas medidas podem não resolver eficazmente a questão generalizada dos microplásticos.
Os métodos comuns de recolha de detritos maiores, como redes ou correias transportadoras, não são úteis para a recolha de microplásticos, uma vez que estas partículas minúsculas requerem mecanismos de bombeamento que consomem muita energia para serem extraídas.
Para responderem a esse desafio, os pesquisadores da Universidade de Cornell, inspiraram-se no caracol-maçã do Havaí. Esta abordagem inovadora tem como objetivo desenvolver um protótipo de robô capaz de imitar o movimento ondulante do caracol para impulsionar o fluxo de água e capturar microplásticos.
As semelhanças entre este robô e os caracóis
Modelado a partir do caracol-maçã havaiano, o robô imita o movimento do pé do caracol para conduzir o fluxo de água e capturar partículas flutuantes. Sunghwan Jung, professor do departamento de engenharia biológica e ambiental da Universidade de Cornell e um dos autores do estudo, explicou que se inspirou na forma como o caracol recolhe as partículas de alimentos na interface água-ar para desenvolver um dispositivo capaz de recolher microplásticos nos oceanos ou nas superfícies da água.
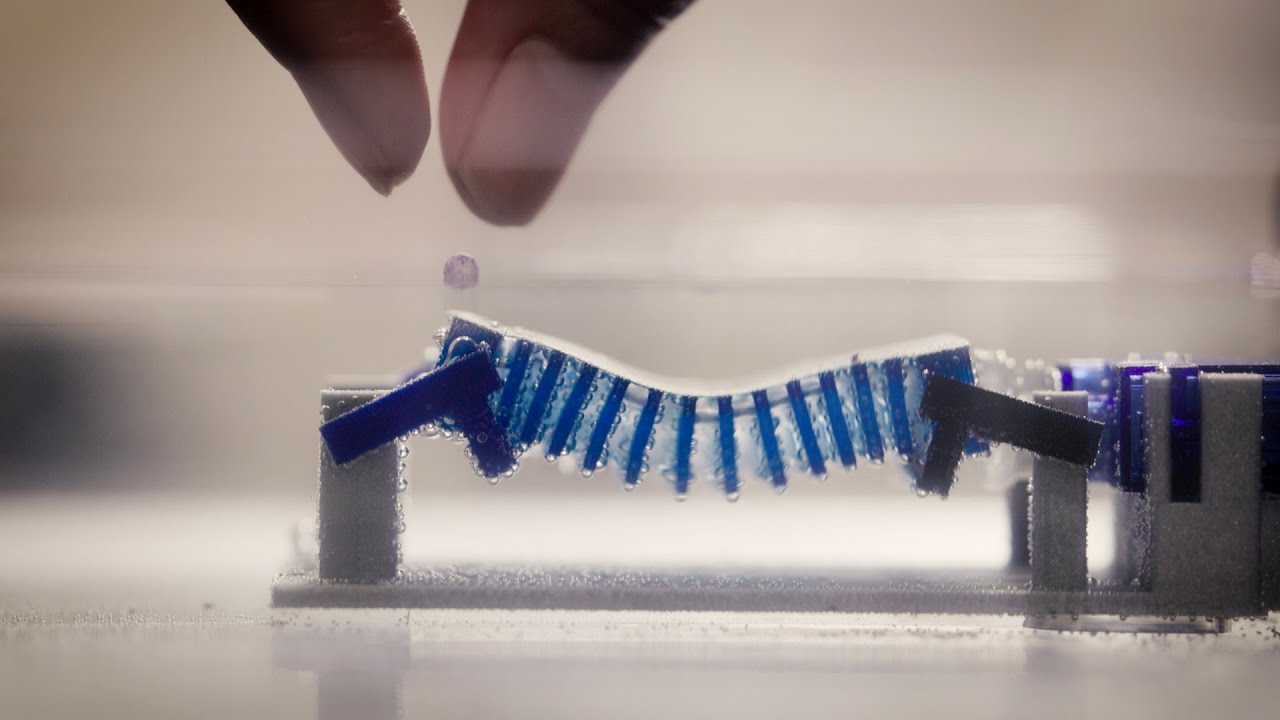
O protótipo modificado, derivado de um projeto existente, necessitaria de ser ampliado para utilização prática em ambientes reais. Utilizando uma impressora 3D, os investigadores criaram uma folha flexível, semelhante a um tapete, com a capacidade de ondular.
Por baixo, uma estrutura helicoidal roda como um saca-rolhas, fazendo com que o tapete ondule e gere uma onda na água. A compreensão do fluxo do fluido foi crucial, exigindo uma análise para caracterizar o comportamento do bombeamento.
O sistema de bombeamento de fluidos, inspirado na técnica do caracol, funciona abertamente no ar. Os pesquisadores descobriram que um sistema fechado, com a bomba fechada e utilizando um tubo para aspirar água e partículas, exigiria um elevado consumo de energia. Em contrapartida, o sistema aberto inspirado no caracol revela-se significativamente mais eficiente.
Apesar do seu pequeno tamanho, o protótipo funciona com apenas 5 volts de eletricidade, demonstrando a sua capacidade de sucção de água. Para contrabalançar o peso de uma bateria e de um motor, poderá ser necessário um dispositivo de flutuação para evitar que o robô se afunde.
Referência da notícia:
Pandey A., Chen Z., Yuk J., et al. Optimal free-surface pumping by an undulating carpet. Nature Communications (2023).